หลักการทำงานของเครื่องวัดความเร็วรอบ (Tachometer)
หลักการทำงานของเครื่องวัดความเร็วรอบ (Tachometer)

Tachometer คือ อะไร
Tachometer (เครื่องวัดความเร็วรอบ) เป็นอุปกรณ์วัดความเร็วในการเคลื่อนที่ของวัตถุ ส่วนใหญ่จะประยุกต์ใช้ในการวัดความเร็วรอบของเครื่องจักรกล ไม่ว่าจะเป็นเพลาล้อรถยนต์ ,ความเร็วของมอเตอร์ เป็นต้น ซึ่งหน่วยการวัดของ Tachometer (เครื่องวัดความเร็วรอบ) คือ รอบต่อนาที หรือ RPM(Round per Minute)
ในประวัติศาสตร์ Tachometer ถูกสร้างขึ้นมาเพื่อช่วยวัดค่าแรงหนีศูนย์ (Centrifugul Force) และในปี 1817 ได้มีการประยุกต์ใช้ Tachometer วัดความเร็วรอบของเครื่องจักรในโรงงานอุตสาหกรรม หลังจากปี 1840 Tachometer ได้ถูกประยุกต์ใช้ในการวัดความเร็วรอบของยานพาหนะอย่างกว้างขวาง
นอกจากนี้ Tachometer ยังสามารถประยุกต์ใช้เข้ากับการแพทย์ได้อีกด้วย อุปกรณืนั้นมีชื่อเรียกว่า Heamatachometer อุปกรร์นี้จะถูกติดตั้งอยู่ในเส้นเลือด vein หรือ Arterry เพื่อวัดค่าอัตราการไหลของเลือด เป็นข้อมูลในการวินิฉัยโรค อาทิ เช่น เส้นเลือดอุดตัน เป็นต้น
ประเภทของ Tachometer (เครื่องวัดความเร็วรอบ)
- Analog Tachometer ประกอบไปด้วยเข็มและหน้าปัดสำหรับการอ่านค่า ไม่สามารถคำนวณค่า หรือ บันทึกค่าได้ โดยค่าความเร็วรอบถูกแปลงเป็นค่าแรงดันไฟฟ้า และแสดงค่าบนหน้าปัดแสดงผล
- Digital Tachometer ประกอบไปด้วยหน้าจอ LCD หรือ LED และหน่วยความจำสำหรับบันทึกค่า สามารถคำนวณค่าทางสถิติได้เหมาะสำหรับงานที่ใต้องใช้ความละเอียดในการวัด และปัจจุบันได้มีใช้กันกว้างขวางกว่าแบบ Analog Tachometer
- Contact และ Non-Contact Tachometer แบบ Contact หรือแบบสัมผัสจะใช้งานโดยการต่อเข้ากับ Shaft ของเครื่องจักรโดยตรง ส่วนแบบ Non-Contact Tachometer วัดค่าความเร็วรอบโดยปล่อยสัญญาณออกไปและนับจำนวนพัลส์เพื่อคำนวณเป็นความเร็วรอบต่อไป
- Time and Frequency Measuring Tachometer แบบ Time Measuring เป็นการวัดค่าจำนวน พัลส์ที่ที่เกิดขึ้นในช่วงเวลานั้นๆ และนำมาคำนวณค่าความเร็วรอบวิะีนี้ส่วนใหญ่จะใช้ในการวัดความเร็วรอบต่ำๆ ส่วนแบบ Frequency Measuring เป็นการคำนวณค่าเป็นความถี่จากพัลส์ที่เข้ามา ซึ่งวิธีจะใช้วัดความเร็วรอบที่ความเร็วสูงๆ
หลักการทำงานของ Tachometer(เครื่องวัดความเร็วรอบ)
หลักการทำงานก็คือเมื่อแสงที่เกิดจาก Infared LED ตกกระทบลงบนรอยต่อ base-collector จะทำให้เกิด electron ด้วยกระบวนการ Photoelectric Effect โดย electron ที่เกิดขึ้นนี้จะถูกฉีดเข้าขา base และจะถูกขยายโดย gain (β) ของ transistor ดังนั้นแล้วจึงนำหลักการนี้ไปใช้ตรวจจับวัตถุได้ โดยหลักการตรวจจับแบ่งออกได้เป็น
- กรณีแบบส่องผ่าน

โดยในกรณีแบบส่องผ่านนี้ วัตถุที่จะทำการตรวจจับจะต้องผ่านที่บริเวณร่องตรงกลาง ทำให้แสงจากตัวส่งไม่สามารถผ่านไปตกกระทบยังตัวรับได้ จึงทำให้ไม่เกิดกระแสไหลในฝั่งของ Detector
- กรณีแบบแบบสะท้อน

สามารถตรวจจับวัตถุได้โดยใช้วิธีสะท้อน เมื่อเจอวัตถุที่มีสีขาวหรือสีอื่นๆที่ไม่ใช่สีดำจะทำให้เกิดการสะท้อนของแสงจากตัวส่ง แต่เมื่อเจอสีดำแสงจะถูกดูดกลืนทำให้ไม่สะท้อนกลับมา
สัญญาณที่ออกมาจากตัว Photodetector ควรจะต้องมีวงจรปรับสภาพสัญญาณ โดยอาจจะใช้ Schmitt trigger หรือใช้วงจร Comparator ก็ได้
บล็อกไดอะแกรมของ Tachometer
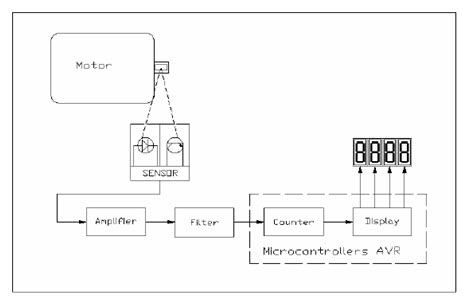
ส่วนตรวจวัดจะประกอบด้วยตัวกำเนิดแสงตัวสะท้อนแสงและตัวรับแสงโดยที่ตัวกำเนิดแสงจะส่งแสงไปที่เพลาของมอเตอร์ซึ่งมีตัวสะท้อนแสงติดอยู่แสงจะสะท้อนกลับมายังตัวรับเมื่อมีแสงมาตกกระทบโฟโตทรานซิสเตอร์จะยอมให้กระแสไหลผ่านตัวมันเองและทำให้เกิดคลื่นสัญญาณความถี่ตามการเคลื่อนที่ตัดผ่านแสงของแผ่นสะท้อนซึ่งสัญญาณที่ได้ออกมาจะส่งผ่านต่อไปยังส่วนขยายสัญญาณและส่วนขยายนี้เองจะทำหน้าที่ขยายสัญญาณความถี่จากส่วนตรวจวัดให้มีระดับสัญญาณสูงขึ้นในระดับที่ส่วนนับสัญญาณสามารถตรวจนับได้และทำการส่งสัญญาณต่อไปที่ส่วนกรองสัญญาณและส่วนกรองสัญญาณจะทำหน้าที่กรองสัญญาณที่ได้รับที่ให้เป็นสัญญาณรูปคลื่นสี่พัลส์เพื่อง่ายและมีความถูกต้องต่อการนับและส่งต่อไปยังส่วนนับสัญญาณซึงจะทำหน้าที่นับสัญญาณที่ได้จากส่วนตรวจวัดและเทียบเวลาเพื่อให้ได้ความเร็วรอบต่อนาที(rpm)แล้วส่งผลที่ได้ไปยังส่วนแสดงผลและส่วนนี้เองจะเป็นส่วนที่รับผลค่าความเร็วรอบมอเตอร์จากวงจรนับไปแล้วแปลงเป็นตัวเลขของแต่ละหลักแสดงผลออกที่หน้าจอแสดงผลแบบ 7- Segment หรือหน้าจอLCDโดยที่ส่วนนับสัญญาณและส่วนส่วนแสดงผลจะใช้ตัวไมโครคอนโทรลเลอร์ในตระกูล AVR ของATMEL ซึ่งสามารถโปรแกรมได้และมีฟังก์ชันTimer/ Counter นำมาใช้ในการนับความถี่และควบคุมส่วนแสดง