มอร์เตอร์ไฟฟ้าคืออะไร?
27/10/2017 |
49800
มอเตอร์ไฟฟ้า เป็นอุปกรณ์ไฟฟ้าที่เปลี่ยนพลังงานไฟฟ้าเป็นพลังงานกล มอเตอร์ที่ใช้งานในปัจจุบัน แต่ละชนิดก็จะมีคุณสมบัติที่แตกต่างออกไปต้องการความเร็ว รอบหรือกำลังงานที่แตกต่างกัน ซึ่งมอเตอร์แต่ละชนิด จะแบ่งได้เป็น 2 ชนิดตามลักษณะการใช้งาน กระแสไฟฟ้า
1.มอเตอร์ไฟฟ้ากระแสสลับ (Alternating Current Motor) หรือเรียกว่าเอ.ซี มอเตอร์ (A.C. MOTOR)การแบ่งชนิดของมอเตอร์ไฟฟ้าสลับแบ่งออกเป็น 3 ชนิดได้แก่
1.1 มอเตอร์ไฟฟ้ากระแสสลับชนิด 1 เฟส หรือเรียกว่าซิงเกิลเฟสมอเตอร์ (A.C. Sing Phase) จะใช้กับแรงดันไฟฟ้า 220 โวลต์มีสายไฟ เข้า 2 สาย มีแรงม้าไม่สูง ส่วนใหญ่ตามบ้านเรือน
- สปลิทเฟส มอเตอร์( Split-Phase motor)
- คาปาซิเตอร์มอเตอร์ (Capacitor motor)
- รีพัลชั่นมอเตอร์ (Repulsion-type motor)
- ยูนิเวอร์แวซลมอเตอร์ (Universal motor)
- เช็ดเดดโพล มอเตอร์ (Shaded-pole motor)
1. 2. มอเตอร์ไฟฟ้าสลับชนิด 2 เฟสหรือเรียกว่าทูเฟสมอเตอร์ (A.C.Two phase Motor)
1. 3. มอเตอร์ไฟฟ้ากระแสสลับชนิด 3 เฟสหรือเรียกว่าทีเฟสมอเตอร์ (A.C. Three phase Motor) เป็นมอเตอร์ที่ใช้ในงานอุตสาหกรรมต้องใช้ระบบไฟฟ้า 3 เฟส ใช้แรงดัน 380 โวลต์ มีสายไฟเข้ามอเตอร์ 3 สาย
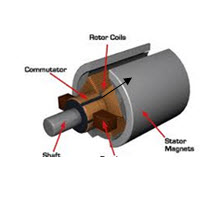
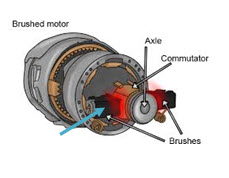
2.มอเตอร์ไฟฟ้ากระแสตรง (Direct Current Motor ) หรือเรียกว่าดี.ซี มอเตอร์ (D.C. MOTOR) การแบ่งชนิดของมอเตอร์ไฟฟ้ากระแสตรงแบ่งออกได้ดังนี้ มอเตอร์ไฟฟ้ากระแสตรงแบ่งออกเป็น 3 ชนิดได้แก่
2.1 มอเตอร์แบบอนุกรมหรือเรียกว่าซีรีส์มอเตอร์ (Series Motor)
2.2 มอเตอร์แบบอนุขนานหรือเรียกว่าชันท์มอเตอร์ (Shunt Motor)
2.3 มอเตอร์ไฟฟ้าแบบผสมหรือเรียกว่าคอมเปาวด์มอเตอร์ (Compound Motor)
ส่วนประกอบหลักๆ ของมอเตอร์ไฟฟ้ากระแสตรง ประกอบด้วยส่วนต่างๆ ดังนี้
ขดลวดอาร์เมเจอร์
มอเตอร์ที่นิยมใช้ในโรงงาน
มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส
1. มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส แบบอินดักชั่น (3 Phase Induction Motor)
2. มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส แบบซิงโครนัส (3 Phase Synchronous Motor)
มอเตอร์ไฟสลับ 3 ที่มีคุณสมบัติที่ดี คือมีความเร็วรอบคงที่เนื่องจากความเร็วรอบอินดักชั่นมอเตอร์ขึ้นอยู่กับความถี่ (Frequency) ของแหล่งกำเนิดไฟฟ้ากระแสสลับ มีราคาถูก โครงสร้างไม่ซับซ้อน สะดวกในการบำรุงรักษาเพราะไม่มีคอมมิวเตเตอร์และแปรงถ่านเหมือนมอเตอร์ไฟฟ้ากระแสตรง เมื่อใช้ร่วมกับเครื่องควบคุมความเร็วแบบอินเวอร์เตอร์ (Inverter) สามารถควบคุมความเร็ว (Speed) ได้ตั้งแต่ศูนย์จนถึงความเร็วตามพิกัดของมอเตอร์ นิยมใช้กันมาก เป็นต้น กำลังในโรงงานอุตสาหกรรม ขับเคลื่อนลิฟท์ขับเคลื่อนสายพานลำเลียง ขับเคลื่อนเครื่องจักรไฟฟ้า เช่น เครื่องไส เครื่องกลึง มอเตอร์อินดักชั่นมี 2 แบบ แบ่งตามลักษณะตัวหมุนคือ
2. ขดลวดสนามแม่เหล็ก
3. ขั้วต่อสาย
4. โครงมอเตอร์
5. ฝาครอบหัว
6. ฝาครอบท้าย
1.1 อินดักชั่นมอเตอร์ที่มีโรเตอร์แบบกรงกระรอก (Squirrel Cage Induction Motor)
อินดักชั่นมอเตอร์แบบนี้ ตัวโรเตอร์จะมีโครงสร้างแบบกรงกระรอกเหมือนกับโรเตอร์ของสปลิทเฟสมอเตอร์
รูปโรเตอร์แบบกรงกระรอก
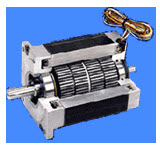
รูปสเตเตอร์ ของอินดักชั่นมอเตอร์
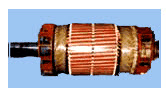
1.2 อินดักชั่นมอเตอร์ที่มีโรเตอร์แบบขดลวด (Wound Rotor Induction Motors)
อินดักชั่นมอเตอร์ชนิดนี้ตัวโรเตอร์จะทำจากเหล็กแผ่นบาง ๆ อัดซ้อนกันเป็นตัวทุ่นคล้าย ๆอาร์เมเจอร์ของมอเตอร์ไฟฟ้ากระแสตรง มีร่องสำหรับวางขดลวดของตัวโรเตอร์เป็นขดลวด 3 ชุด สำหรับสร้างขั้วแม่เหล็ก 3 เฟส เช่นกันปลายของขดลวดทั้ง 3 ชุดต่อกับสปริง(Slip Ring) จำนวน 3 อันสำหรับเป็นทางให้กระแสไฟฟ้าครบวงจรทั้ง 3 เฟสการทำงานของอินดักชั่นมอเตอร์
เมื่อจ่ายไฟฟ้าสลับ 3 เฟสให้ที่ขดลวดทั้ง 3 ของตัวสเตเตอร์จะเกิดสนามแม่เหล็กหมุนรอบ ๆ ตัวสเตเตอร์ ทำให้ตัวหมุน(โรเตอร์) ได้รับการเหนี่ยวนำทำให้เกิดขั้วแม่เหล็กที่ตัวโรเตอร์ และขั้วแม่เหล็กนี้ จะพยายามดึงดูดกับสนามแม่เหล็กที่หมุนอยู่รอบ ๆ ทำให้มอเตอร์
ของอินดักชั่นมอเตอร์หมุนไปได้ ความเร็วของสนามแม่เหล็กหมุนที่ตัวสเตเตอร์นี้จะคงที่ตามความถี่ของไฟฟ้ากระแสสลับ ดังนั้นโรเตอร์ของอินดักชั่น ของมอเตอร์ จึงหมุนตามสนามหมุนดังกล่าวไปด้วยความเร็วเท่ากับความเร็วของสนามแม่เหล็กหมุน
2. มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟสแบบซิงโครนัสเป็นมอเตอร์ได้ใหญ่ที่สุด
มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟสแบบซิงโครนัส (3 Phase Synchronous Motor)
โครงสร้างของซิงโครนัสมอเตอร์ ที่สำคัญมี 2 ส่วนคือ
2. โรเตอร์ (Rotor)
อินดักชั่นมอเตอร์มีร่องสำหรับพันขดลวดจำนวน 3 ชุด เฟสละ1 ชุด เมื่อจ่ายไฟฟ้ากระแสสลับ 3 เฟส ให้กับสเตเตอร์จะเกิดสนามแม่เหล็กหมุนขึ้น เมื่อสนามแม่เหล็กหมุนอินดักชั่นมอเตอร์
ของซิงโครนัสมอเตอร์เป็นแบบขั้วแม่เหล็กยื่น และมีขดลวดสนามแม่เหล็กพันอยู่รอบ ๆโดยใช้แหล่งจ่ายไฟฟ้ากระแสภายนอก เมื่อจ่ายไฟฟ้ากระแสตรงให้กับโรเตอรจะทำให้เกิดขั้วแม่เหล็กที่โรเตอร์ขึ้น ขั้วแม่เหล็กนี้จะเกาะตามการหมุนของสนามหมุนของสเตเตอร์ ทำให้มอเตอร์หมุนไปด้วยความเร็วเท่ากับความเร็วของสนามแม่เหล็กที่สเตเตอร์
1.มอเตอร์ไฟฟ้ากระแสสลับ (Alternating Current Motor) หรือเรียกว่าเอ.ซี มอเตอร์ (A.C. MOTOR)การแบ่งชนิดของมอเตอร์ไฟฟ้าสลับแบ่งออกเป็น 3 ชนิดได้แก่
1.1 มอเตอร์ไฟฟ้ากระแสสลับชนิด 1 เฟส หรือเรียกว่าซิงเกิลเฟสมอเตอร์ (A.C. Sing Phase) จะใช้กับแรงดันไฟฟ้า 220 โวลต์มีสายไฟ เข้า 2 สาย มีแรงม้าไม่สูง ส่วนใหญ่ตามบ้านเรือน
- สปลิทเฟส มอเตอร์( Split-Phase motor)
- คาปาซิเตอร์มอเตอร์ (Capacitor motor)
- รีพัลชั่นมอเตอร์ (Repulsion-type motor)
- ยูนิเวอร์แวซลมอเตอร์ (Universal motor)
- เช็ดเดดโพล มอเตอร์ (Shaded-pole motor)
1. 2. มอเตอร์ไฟฟ้าสลับชนิด 2 เฟสหรือเรียกว่าทูเฟสมอเตอร์ (A.C.Two phase Motor)
1. 3. มอเตอร์ไฟฟ้ากระแสสลับชนิด 3 เฟสหรือเรียกว่าทีเฟสมอเตอร์ (A.C. Three phase Motor) เป็นมอเตอร์ที่ใช้ในงานอุตสาหกรรมต้องใช้ระบบไฟฟ้า 3 เฟส ใช้แรงดัน 380 โวลต์ มีสายไฟเข้ามอเตอร์ 3 สาย
2.มอเตอร์ไฟฟ้ากระแสตรง (Direct Current Motor ) หรือเรียกว่าดี.ซี มอเตอร์ (D.C. MOTOR) การแบ่งชนิดของมอเตอร์ไฟฟ้ากระแสตรงแบ่งออกได้ดังนี้ มอเตอร์ไฟฟ้ากระแสตรงแบ่งออกเป็น 3 ชนิดได้แก่
2.1 มอเตอร์แบบอนุกรมหรือเรียกว่าซีรีส์มอเตอร์ (Series Motor)
2.2 มอเตอร์แบบอนุขนานหรือเรียกว่าชันท์มอเตอร์ (Shunt Motor)
2.3 มอเตอร์ไฟฟ้าแบบผสมหรือเรียกว่าคอมเปาวด์มอเตอร์ (Compound Motor)
ส่วนประกอบหลักๆ ของมอเตอร์ไฟฟ้ากระแสตรง ประกอบด้วยส่วนต่างๆ ดังนี้
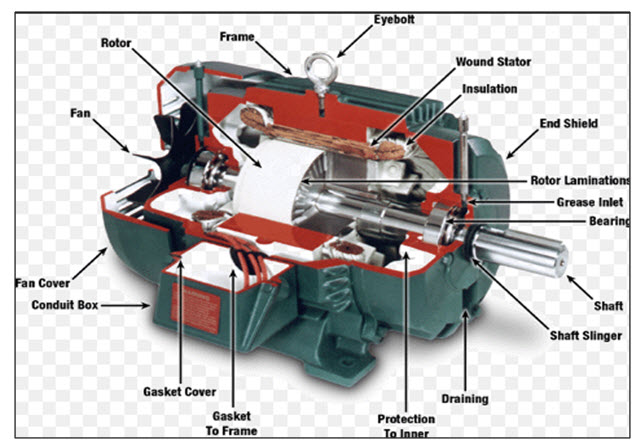




ขดลวดอาร์เมเจอร์
มอเตอร์ที่นิยมใช้ในโรงงาน
มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส

1. มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส แบบอินดักชั่น (3 Phase Induction Motor)
2. มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส แบบซิงโครนัส (3 Phase Synchronous Motor)

มอเตอร์ไฟสลับ 3 ที่มีคุณสมบัติที่ดี คือมีความเร็วรอบคงที่เนื่องจากความเร็วรอบอินดักชั่นมอเตอร์ขึ้นอยู่กับความถี่ (Frequency) ของแหล่งกำเนิดไฟฟ้ากระแสสลับ มีราคาถูก โครงสร้างไม่ซับซ้อน สะดวกในการบำรุงรักษาเพราะไม่มีคอมมิวเตเตอร์และแปรงถ่านเหมือนมอเตอร์ไฟฟ้ากระแสตรง เมื่อใช้ร่วมกับเครื่องควบคุมความเร็วแบบอินเวอร์เตอร์ (Inverter) สามารถควบคุมความเร็ว (Speed) ได้ตั้งแต่ศูนย์จนถึงความเร็วตามพิกัดของมอเตอร์ นิยมใช้กันมาก เป็นต้น กำลังในโรงงานอุตสาหกรรม ขับเคลื่อนลิฟท์ขับเคลื่อนสายพานลำเลียง ขับเคลื่อนเครื่องจักรไฟฟ้า เช่น เครื่องไส เครื่องกลึง มอเตอร์อินดักชั่นมี 2 แบบ แบ่งตามลักษณะตัวหมุนคือ
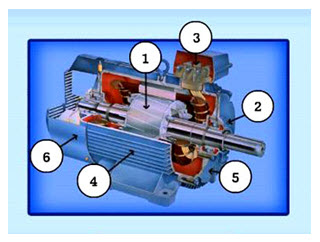
2. ขดลวดสนามแม่เหล็ก
3. ขั้วต่อสาย
4. โครงมอเตอร์
5. ฝาครอบหัว
6. ฝาครอบท้าย
1.1 อินดักชั่นมอเตอร์ที่มีโรเตอร์แบบกรงกระรอก (Squirrel Cage Induction Motor)
อินดักชั่นมอเตอร์แบบนี้ ตัวโรเตอร์จะมีโครงสร้างแบบกรงกระรอกเหมือนกับโรเตอร์ของสปลิทเฟสมอเตอร์
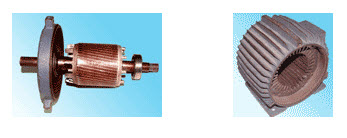
รูปโรเตอร์แบบกรงกระรอก
รูปสเตเตอร์ ของอินดักชั่นมอเตอร์
1.2 อินดักชั่นมอเตอร์ที่มีโรเตอร์แบบขดลวด (Wound Rotor Induction Motors)
อินดักชั่นมอเตอร์ชนิดนี้ตัวโรเตอร์จะทำจากเหล็กแผ่นบาง ๆ อัดซ้อนกันเป็นตัวทุ่นคล้าย ๆอาร์เมเจอร์ของมอเตอร์ไฟฟ้ากระแสตรง มีร่องสำหรับวางขดลวดของตัวโรเตอร์เป็นขดลวด 3 ชุด สำหรับสร้างขั้วแม่เหล็ก 3 เฟส เช่นกันปลายของขดลวดทั้ง 3 ชุดต่อกับสปริง(Slip Ring) จำนวน 3 อันสำหรับเป็นทางให้กระแสไฟฟ้าครบวงจรทั้ง 3 เฟสการทำงานของอินดักชั่นมอเตอร์
เมื่อจ่ายไฟฟ้าสลับ 3 เฟสให้ที่ขดลวดทั้ง 3 ของตัวสเตเตอร์จะเกิดสนามแม่เหล็กหมุนรอบ ๆ ตัวสเตเตอร์ ทำให้ตัวหมุน(โรเตอร์) ได้รับการเหนี่ยวนำทำให้เกิดขั้วแม่เหล็กที่ตัวโรเตอร์ และขั้วแม่เหล็กนี้ จะพยายามดึงดูดกับสนามแม่เหล็กที่หมุนอยู่รอบ ๆ ทำให้มอเตอร์
ของอินดักชั่นมอเตอร์หมุนไปได้ ความเร็วของสนามแม่เหล็กหมุนที่ตัวสเตเตอร์นี้จะคงที่ตามความถี่ของไฟฟ้ากระแสสลับ ดังนั้นโรเตอร์ของอินดักชั่น ของมอเตอร์ จึงหมุนตามสนามหมุนดังกล่าวไปด้วยความเร็วเท่ากับความเร็วของสนามแม่เหล็กหมุน
2. มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟสแบบซิงโครนัสเป็นมอเตอร์ได้ใหญ่ที่สุด

มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟสแบบซิงโครนัส (3 Phase Synchronous Motor)
โครงสร้างของซิงโครนัสมอเตอร์ ที่สำคัญมี 2 ส่วนคือ
2. โรเตอร์ (Rotor)

อินดักชั่นมอเตอร์มีร่องสำหรับพันขดลวดจำนวน 3 ชุด เฟสละ1 ชุด เมื่อจ่ายไฟฟ้ากระแสสลับ 3 เฟส ให้กับสเตเตอร์จะเกิดสนามแม่เหล็กหมุนขึ้น เมื่อสนามแม่เหล็กหมุนอินดักชั่นมอเตอร์
ของซิงโครนัสมอเตอร์เป็นแบบขั้วแม่เหล็กยื่น และมีขดลวดสนามแม่เหล็กพันอยู่รอบ ๆโดยใช้แหล่งจ่ายไฟฟ้ากระแสภายนอก เมื่อจ่ายไฟฟ้ากระแสตรงให้กับโรเตอรจะทำให้เกิดขั้วแม่เหล็กที่โรเตอร์ขึ้น ขั้วแม่เหล็กนี้จะเกาะตามการหมุนของสนามหมุนของสเตเตอร์ ทำให้มอเตอร์หมุนไปด้วยความเร็วเท่ากับความเร็วของสนามแม่เหล็กที่สเตเตอร์